
Take a look at what I have done.
Work Experience
 |
Ningbo XiaoCheng Information Technology Co., Ltd. | Ningbo, China |
| Intern in the Product Development Department | April 2019 – September 2021 |

|
Web Page Development: Worked on projects using HTML and JavaScript to develop corporate web pages and ensure that the web pages are dynamic. Database Development: Designed and incorporated the database systems into the corporate WeChat applet, facilitating efficient information collection and storage. Program Maintenance: Contributed to the development of document files and designs for another corporate WeChat applet, actively participating in technical feasibility assessments and design optimization processes. |
Project Experience
 |
ROB 422: Introduction to Algorithmic Robotics | Ann Arbor, MI |
| Localization using Kalman Filter and Particle Filter | December 2023 |

|
Simulation Environment: Built simulation environment in PyBullet with a customized map and a PR2 robot. Kalman Filter Implementation: Implemented Kalman Filter to achieve localization by continuously updating its estimation of a system's state using a combination of motion model and incoming sensor data. Particle Filter Implementation: Implemented Particle Filter to achieve localization by using particles to represent system states, updating and resampling them with new sensor data to identify the most probable state. |
|
ROB 535: Self-Driving Cars: Perception and Control | Ann Arbor, MI |
| Monocular 3D Object Detection | December 2023 |

|
Network Structure Revision: Revised and tested MonoCon on the KITTI benchmark, specifically for car detection in various scenarios and evaluated the performance based on 3D bounding box predictions. Dataset and Training: Data augmentation techniques were used to enhance the model's robustness. Extensive experimentation was conducted to optimize hyperparameters, ensuring improved model performance. |
|
ROB 498: Robot Learning for Planning and Control | Ann Arbor, MI |
| Trajectory Optimization of Inverted Double Pendulum on a Cart Problem | April 2023 |
|
Differential Dynamic Programming (DDP) Implementation: Utilized DDP to implement a trajectory optimization algorithm for inverted double pendulum on a cart task. Model Predictive Path Integral Control (MPPI) Implementation: Implemented the MPPI algorithm to achieve the same task goal. Cost Function Design: Developed appropriate cost functions for both methods. |
|
ROB 550: Robotic Systems Laboratory | Ann Arbor, MI |
| Manipulation and Computer Vision | September 2022 - November 2022 | |
| Mobile Robotics | November 2022 - December 2022 |
|
Position Calibration: Executed precise calibration and transformation from the depth camera coordinate to the world coordinate. State Machine Control: Devised a sophisticated state machine to control the arm's movement in the workplace systematically. Block Detector: Detected blocks of different colors and determined object grabbing and placement positions. Kinematic Algorithm: Conducted thorough debugging of the inverse kinematic code, ensuring the arm's movement aligned with expectations. |
|
Real-time Positioning System: Utilized 2D Lidar to construct a real-time positioning system for the robot, incorporating a Monte Carlo (MCL) positioning algorithm based on odometer and laser ranging, allowing real-time location on known maps. Path Planning: Developed A* algorithm enabling the robot to plan the optimal path within the environment. Automatic Exploration and Obstacle Avoidance: Integrated a robotic system with automatic exploration capabilities in unknown areas and obstacle avoidance features for safe and efficient task completion. |
 |
Individual Final Year Project | Ningbo, China |
| Autonomous Cruiser Robot Based on Laser Radar with Arm | July 2021 – April 2022 |
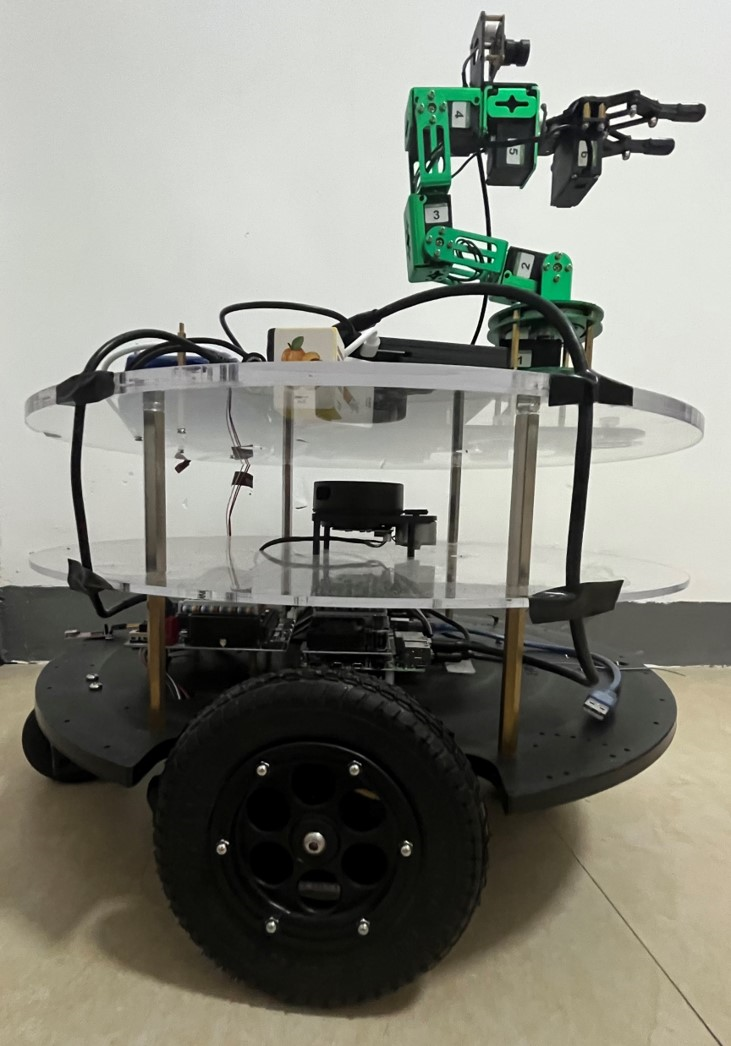 |
Environment Perception and Obstacle Avoidance: Utilized Simultaneous Localization and Mapping (SLAM) with 2D Lidar for real-time map creation and obstacle avoidance. Positioning and Navigation: Implemented the adaptive Monte Carlo positioning (AMCL) algorithm for autonomous navigation. Path Planning: Employed the rapidly exploring random tree (RRT) algorithm for efficient path planning. Object Pick-up: Integrated a monocular camera for object positioning, with a 4-DOF manipulator controlled by an inverse kinematics (IK) algorithm for precise target grabbing. |
|
UNNC Formula Student Racing Team | Ningbo, China |
| Electric Formula Student Project | November 2019 – April 2022 |
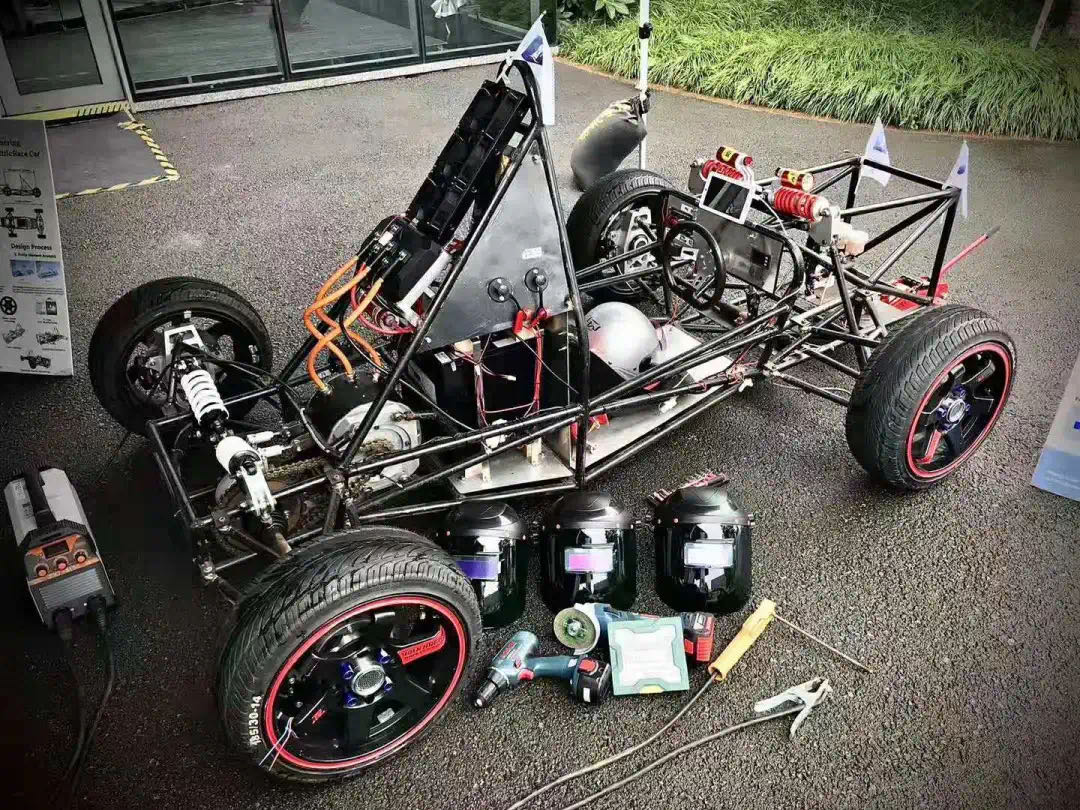 |
Electrical System Design: Diagnosed and resolved issues in the existing electrical system, constructing a new and enhanced system for the vehicle. Battery Bank Development: Designed and built a new battery pack, significantly enhancing the vehicle's power. |
Research Experience
 |
Fluent Robotics Lab | Ann Arbor, MI |
| Human-Robot Handover Project using Stretch 2 | September 2023 – Present |
|
Motion Planning: Specialized in motion planning, employing MoveIt! for robot arm trajectory and integrating Dijkstra's algorithm with Dynamic Window Approach (DWA) planner for base path planning. Platform Interface: Developed Python scripts for low-level hardware control and interfaced with complex simulation environments within the ROS package, achieving integration and manipulation of virtual environments for real robot testing and development. Module Integration: Integrated motion planning with SLAM and perception to form a complete autonomous robot system. |
 |
ROAHM Lab | Ann Arbor, MI |
| Learning-based Algorithm on 1/10 Scale RC Rover | June 2023 – August 2023 |
|
Simulation and Track Design: Developed a precise simulation environment tailored for a custom racetrack. Advanced Control System Implementation: Upgraded the control system from conventional PID to the sophisticated Model Predictive Control (MPC) algorithm. Collision Avoidance: Introduced a competition-oriented training strategy using MPC agent as a rival vehicle. |
|
Magnetic Resonance Imaging Research Center | Ningbo, China |
| Deep Learning for Magnetic Resonance Image Reconstruction | July 2020 – September 2020 |
Preprocessing and Reproduction: Applied Convolutional Neural Network (CNN) to train a model, involving meticulous preparation of datasets, model construction, and hyperparameter adjustments.
Image Processing: Utilized U-Net for comprehensive CT and MRI image processing, encompassing tasks such as image preprocessing, feature extraction, classification, segmentation, and other related operations.
Leadership Experience
 |
AIESEC | Kathmandu, Nepal |
| International Volunteer | June 2019 – July 2019 |
Leadership Development: Engaged in a one-month international volunteering program in Nepal.
Teaching Content: Educated local students in Chinese and English, covering general areas of science and technology.
Cultural Impact: Cultivated cross-cultural communication and leadership skills and adaptability within a foreign environment, positively impacting both the local community and personal development.